Sistema de levitación neumática

El sistema didáctico de levitación neumática permite levantar una pelota de icopor en un tubo mediante el flujo de aire producido por un ventilador.
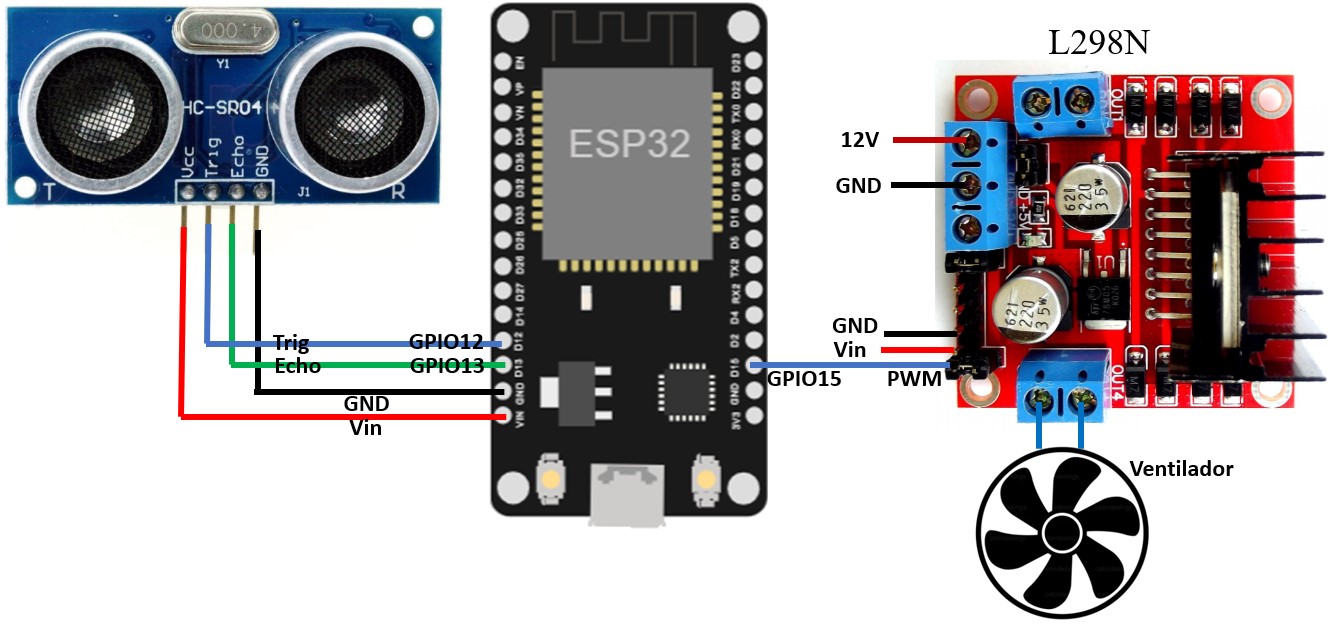
El flujo de aire se puede variar al modificar la velocidad del ventilador a través de una señal PWM producida desde el GPIO15 del ESP32.
La altura de la pelota se puede medir mediante un sensor de distancia por ultrasonido HC-SR05. Está conectado al ESP32 de la siguiente forma: echoPin al GPIO13 y el trigPin al GPIO12.
La tarjeta ESP32 está conectada al sistema de levitación neumática y al computador, permitiendo la manipulación del ventilador y el acceso al sensor a través del laboratorio remoto.
Los pines de conexión son los siguientes:
Programa para control proporcional
El uso de este programa se puede observar en el siguiente video:
Este programa permine controlar el levitador a través de la estrategia:
u = q + Kp*(r-y)
los valores asociados son:
- Señal de control (u): valor entre 0 y 32767 indicando el ciclo útil del PWM que alimenta el ventilador, correspondientes a 0% y 100% respectivamente.
- Punto de equilibrio (q): valor entre 0 y 32767 de offset sobre la señal de control.
- Constante proporcional (Kp): constante de ajuste de la estrategia de control.
- Referencia (r): valor entre 0 y 100 indicando la referencia en porcentaje, 0 corresponde a la posición de la bola en la parte baja y 100 a la posición de la bola en la parte alta.
- Posición (y): valor entre 0 y 100 indicando la posición medida por el sensor ultrasónico expresada en porcentaje, 0 corresponde a la posición de la bola en la parte baja y 100 a la posición de la bola en la parte alta.
El programa imprime por puerto serial 4 valores en el orden: referencia, posición, constante proporcional y señal de control.
Al usar el laboratorio remoto en la gráfica se puede observar la evolución de los dos primeros valores de referencia y posición.
No se observan los últimos dos ya que no se grafican los valores en una línea después de encontrar el caracter #.
Usando los caracteres "q", "k" y "r" seguido de un número se pueden cambiar los valores de equilibrio, constante proporcional y referencia respectivamente.
Por ejemplo:
- "q4000": Cambia el punto de equilibrio a 4000.
- "k20": Cambia la constante proporcional a 20.
- "r50": Cambia la referencia al 50%