Robot móvil

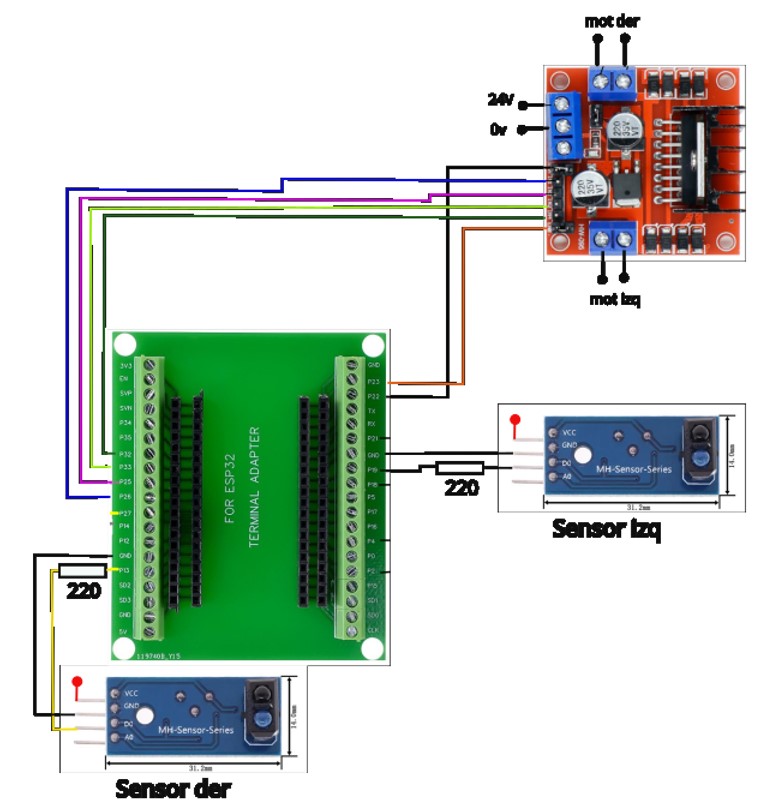
Este laboratorio remoto consiste en un robot móvil conectado a dos motores para movimiento y dos sensores infrarojos para detectar lineas negras.
El esquema de conexiones se muestra a continuación:
Archivo con código para editar en Arduino IDE: Archivo para cargar directamente:
Este programa permine controlar el robot móvil con los siguientes comandos:
- H => Ayuda (escribe los comandos disponibles)
- P => Parar
- A => Adelante
- D => Derecha
- I => Izquierda
- R => reversa
- S => Estado de sensores
- X=> Para el robot al detectar piso negro
- V# => velocidad con número de 0 a 255
- Número de 1 a 9 => Segundos de espera
- Parar => Centro de la imagen
- Adelante => Parte superior central de la imagen
- Derecha => Parte derecha central de la imagen
- Izquierda => Parte izquierda central de la imagen
- reversa => Parte inferior central de la imagen