Sistema de Servoposición y Banda
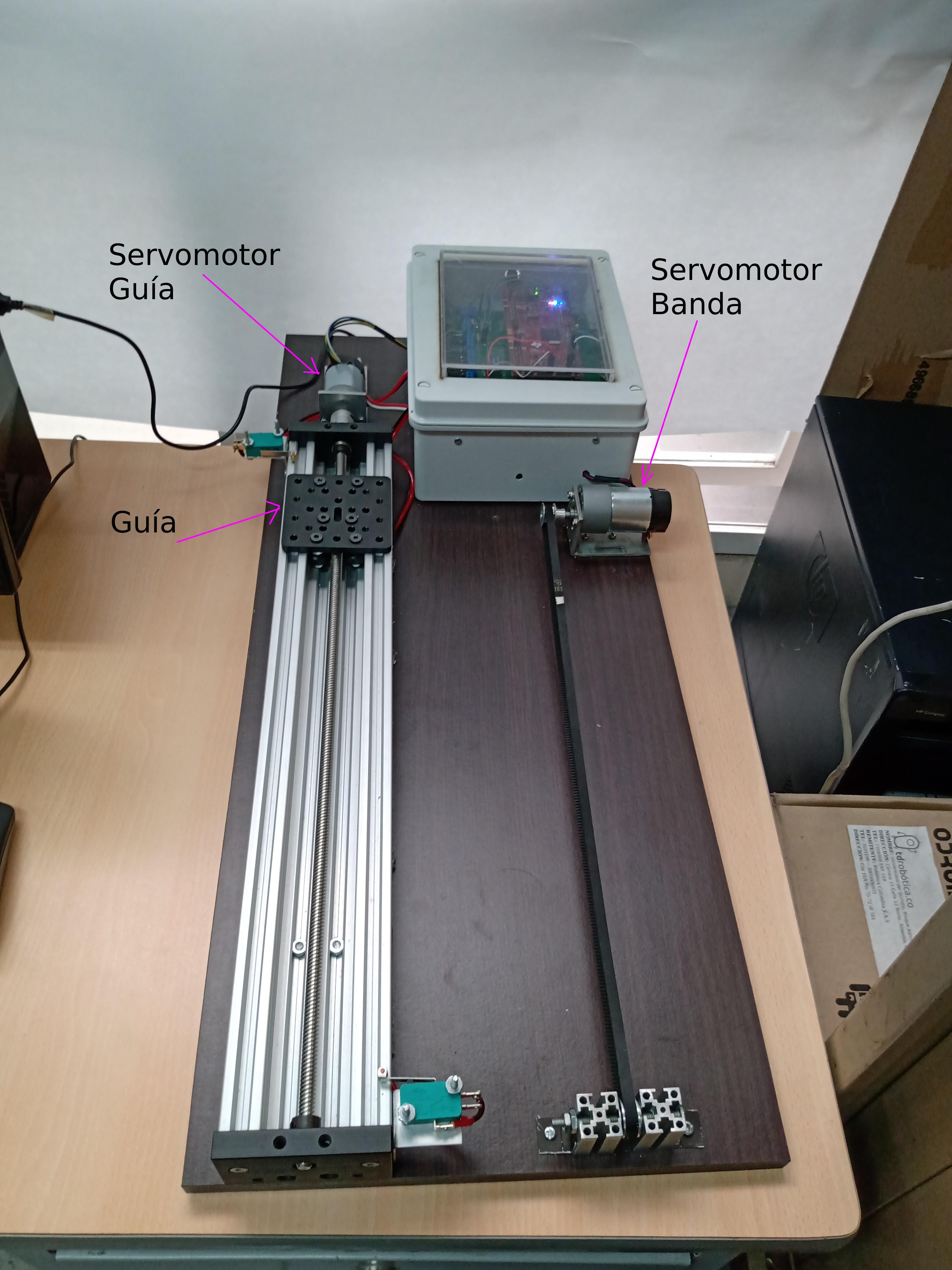
Este sistema consta de:
- Una banda movida por un motor-reductor con encoder.
- Un tornillo para tuerca de bolas recirculantes que mueve una guía, movido con un motor-reductor con encoder.
El sistema permite variar la velocidad de la banda y medir dicha velocidad con el encoder, también posicionar la guía y medir su posición con su respectivo encoder.
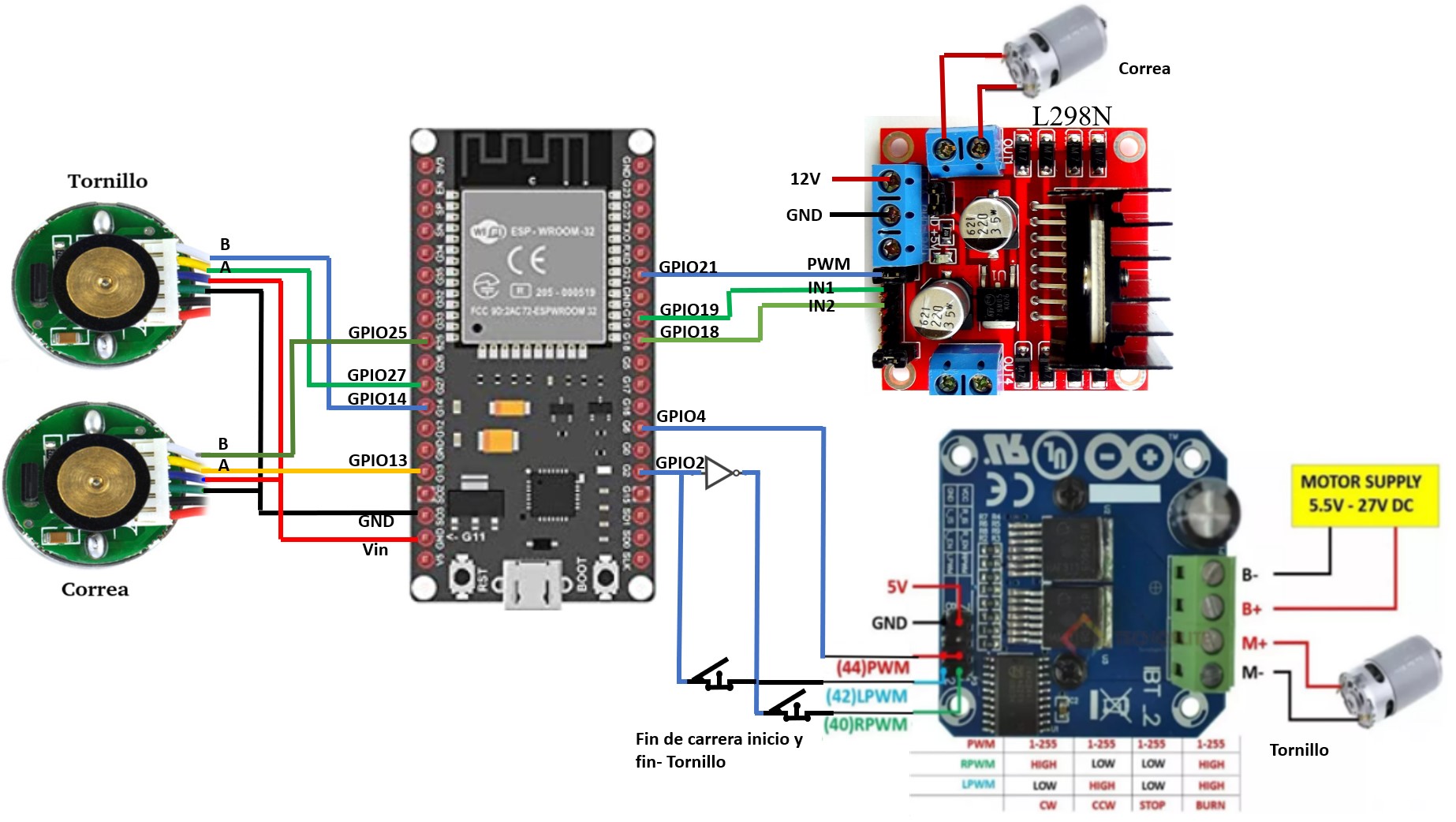
La tarjeta ESP32 está conectada al sistema de servoposición y al computador, permitiendo la manipulación de los servomotores y el acceso a los datos de los encoders a través del laboratorio remoto.
La conexión es la siguiente:
Programa para control de posición de la guía
El uso de este programa se puede observar en el siguiente video:
Este programa permine mover la guía al modificar el valor del PWM y recibe el valor de posición del enconder, se imprimen dos valores
coorespondientes a los siguientes:
- Valor de posición: valor entregado por el encoder.
-
Señal de control: valor entre -255 y 255, el signo indica la dirección de movimiento y la magnitud indica el ciclo útil del PWM enviado al motor de la guía.
La magnitud entre 0 y 255 indica un ciclo útil entre 0% y 100% respectivamente.
Se permite interactuar con el programa a través del uso de 2 comandos con los caracteres 'z' y 'u',
'z' permite resetear el enconder y establecerlo en el valor 0, 'u' seguido de un número permite actualizar el valor del PWM.
Por ejemplo:
- "z": Cambia a 0 el valor medido en el encoder.
- "u-200": sentido de giro horario con valor de 200 en el ciclo útil del PWM.
- "u150": sentido de giro antihorario con valor de 150 en el ciclo útil del PWM.
Programa para control de velocidad de la banda
El uso de este programa se puede observar en el siguiente video:
Este programa permine cambiar la velocidad de la banda al modificar el valor del PWM y recibe el valor de velocidad entregado por el enconder, se imprimen dos valores
coorespondientes a los siguientes:
- Valor de velocidad: valor entregado por el encoder.
-
Señal de control: valor entre -255 y 255, el signo indica la dirección de movimiento y la magnitud indica el ciclo útil del PWM enviado al motor de la banda.
La magnitud entre 0 y 255 indica un ciclo útil entre 0% y 100% respectivamente.
Se permite interactuar con el programa a través del uso del caracter 'u' seguido del número para la dirección y ciclo útil del PWM asignados al motor.
Por ejemplo:
- "u-200": sentido de giro horario con valor de 200 en el ciclo útil del PWM.
- "u150": sentido de giro antihorario con valor de 150 en el ciclo útil del PWM.